These are the projects currently taking place at EPFL Space Center and within the student associations for Fall 2026.
Whether you want to find a project or propose one, make sure to check the guidelines of your section first.
Each section has its own rules for semester projects that will apply by default.
The master project guidelines are the official rules for the entire EPFL.
The ClearSpace Prize honors an EPFL student whose semester project or Master’s thesis shows excellence and advances research in space sustainability.
-
Advanced planetary imaging via low-noise SPAD detection
-
Correct the rolling shutter effect of the new TELESTO CMOS detector
-
Electronics implementation of a Beckhoff-based Control Architecture for Telescope Instrumentation
-

Improve accuracy of reentry trajectories
-

Recovering satellite location and time measurements with imperfect tracking
-
Study the consequences of the break-up of the geostationary satellite Luch/Olymp
-

Detect faint fragments from the break-up of the geostationary satellite Luch/Olymp
-
Implement procedures to photometrically calibrate space debris tracking data
-
Detect space objects observed with the Dark Energy Camera
-

Improving the closed-loop telescope control software for high precision satellite tracking
-
Proton Irradiation of Nvidia GPU
-
Internship with Lumartix SA: A solar simulation lighting system for the AM0 spectrum
-

EPFL Rocket Team
-
EPFL Spacecraft Team
-
Xplore
-

Asclepios
Advanced planetary imaging via low-noise SPAD detection
- Supervision: LUMES/LASTRO/eSpace (Prof. Fabrizio Carbone/Prof. Jean-Paul Kneib/Stephan Hellmich) with external support from UniGE
- Type of Project: Master thesis project
- Duration: 26 weeks (Official start/end date: TBD)
- Submission of final report: TBD
- Final Presentation: TBD
- Recommended: This project is suitable for a student interested in optical design, telescope instrumentation and astronomy.
CONTEXT
The laboratory for ultrafast microscopy and electron scattering (LUMES) at the EPFL, in collaboration with the EPFL Laboratory of Astrophysics, EPFL Space Center and the University of Geneva, proposes a master thesis project titled “Advanced planetary imaging via low-noise SPAD detection”. The project aims at optically configuring TELESTO, a visible light 60 cm aperture reflector telescope at the observatory of Geneva in Versoix to perform planetary imaging with a new detector offering unprecedented signal to noise ratio and very high frame rates. Such a detector, based on the SPAD technology, has 10 microns-sized pixels, thus requiring the extension of the telescope focal by optical refractive tools (Barlow lens). The project is expected to last six months, a compensation for the living costs is also foreseen.PROJECT SCOPE
The student is expected to learn the basics of ray tracing optics (Opticad, Zemax) and design and test the proper combination of focal extender and filters for the specific camera. They are also expected to install the new detector and develop a basic image acquisition software. Finally, the student will perform test observations with the new detector on planets and potentially the sun and satellites in Low-Earth Orbit.TASKS
- Familiarize yourself with ray tracing software and TELESTO
- Develop a suitable configuration for installing the SPAD detector
- Commission the instrument on the telescope
- Develop basic image acquisition software
- Perform test observations
CONTACT
Dr. Stephan Hellmich: stephan.hellmich@epfl.chSTATUS OF THE PROJECT
Correct the rolling shutter effect of the new TELESTO CMOS detector
- Supervisor: eSpace/LASTRO (Prof. Jean-Paul Kneib/Stephan Hellmich/s2a-systems)
- Type of Project: Semester project (TP4b)
- Duration: 14 weeks (Official start/end date: September 7-December 18)
- Submission of final report: January 11
This project is suitable for a student interested in astronomy and optical instrument design.
CONTEXT
The 0.6m TELESTO optical telescope at the Observatory of Geneva was recently upgraded with a new CMOS detector. The instrument uses a rolling shutter which results in the time of exposure not being the same for each pixel in the acquired image. While this effect is not important for most observations, it needs to be considered for example for satellite tracking, where knowledge about the precise timing is very important to determine the orbit or to perform photometric analysis. The characteristics of the shutter were already identified in a previous project. This project aims to develop a technique to correct for the rolling shutter effect for observations of fast moving objects.
PROJECT SCOPE
During the project, you will familiarize yourself with the new detector and learn about requirements of passive optical observations of satellites and space debris. In order for the camera to be used for space debris observation, the rolling shutter effect needs to be corrected for. Based on previous work where the line readout speed was determined, a method needs to be implemented that determines the precise start and end of exposure for each pixel of the detector. This method needs to account for trailed observations (where the location of the stars on the detector remain constant over the exposure) and tracked observations (where the stars move across the detector while exposing and the observed object remains stationary). To verify the correction, you will use TELESTO with the new detector to perform test observations of satellites in Low Earth Orbit (LEO), apply the shutter correction and verify the astrometry derived from the images.
TASKS
In a previous project, procedures to detect fragments and determine their orbits were implemented. The goal this project is to study how the fragments disperse in orbit and investigate if they might pose a risk to decommissioned and active satellites in GEO. The investigation consists of the following tasks
- Familiarize yourself with the hardware and software interfaces
- Implement routines to correct the shutter effect
- Perform satellite tracking to verify the shutter correction
CONTACT
Dr. Stephan Hellmich
STATUS OF THE PROJECT
Electronics implementation of a Beckhoff-based Control Architecture for Telescope Instrumentation
- Supervisor: Prof. Jean-Paul Kneib
- Type of Project: Master’s Thesis
- Duration: 4 months (start in Autumn 2026)
- Submission of final report: January 11
This project is well suited for a student interested in astronomy, robotics automation, astrophysics instrumentation and high precision systems. Prior knowledge in electronics (programmable logic controllers) and programming for actuator control (Python, structured text) is preferred.
CONTEXT
The Astrobot group at the EPFL Laboratory of Astrophysics (LASTRO) builds small robots that precisely position mirrors and optical fibers on large telescopes. These large ground-based telescopes are used by scientists to study distant galaxies, dark matter, and dark energy. These positioning robots (also called Folding Mirror mounts) require micrometric positioning precision and stability, and are used to redirect the star light within the instrument.
One of the key developments for the future BlueMUSE instrument which will survey the blue portion of the celestial spectra, is a series of motorized Folding Mirrors (FMs) used to align and redirect optical beams throughout the instrument. In the final instrument, approximately 80 motorized axes will be distributed across the various folding mirror assemblies.
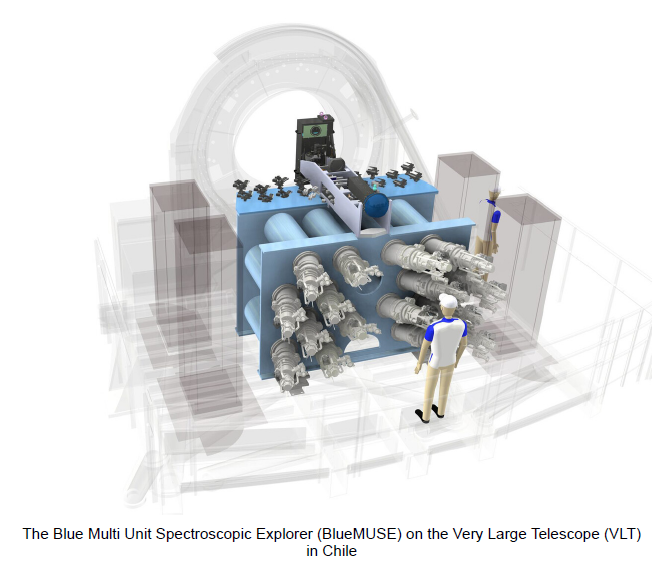
To support this large-scale deployment, the control architecture is transitioning from CAN-based motor controllers to a Beckhoff EtherCAT-based automation system. Such an architecture provides a modular, scalable, and maintainable framework for integrating a large number of actuators, sensors, and control functions within the instrument.
More information about Astrobot can be found at:
https://www.epfl.ch/labs/lastro/scientific-activities/astrobots/
PROJECT SCOPE
During the project, you will familiarize yourself with the new detector and learn about requirements of passive optical observations of satellites and space debris. In order for the camera to be used for space debris observation, the rolling shutter effect needs to be corrected for. Based on previous work where the line readout speed was determined, a method needs to be implemented that determines the precise start and end of exposure for each pixel of the detector. This method needs to account for trailed observations (where the location of the stars on the detector remain constant over the exposure) and tracked observations (where the stars move across the detector while exposing and the observed object remains stationary). To verify the correction, you will use TELESTO with the new detector to perform test observations of satellites in Low Earth Orbit (LEO), apply the shutter correction and verify the astrometry derived from the images.
TASKS
The objective of this project is to implement and validate a Beckhoff-based control architecture on an existing Folding Mirror testbench.
The student will become familiar with the current testbench architecture and its CAN based motor control system, before integrating Beckhoff PLC hardware and EtherCAT modules. The project will involve both hardware and software development, with a focus on motion control, system integration and performance characterization.
The work can be divided into the following tasks:
• Hardware Setup
Set up Beckhoff components on the Folding Mirror testbench, integrate motors, encoders and limit switches. Validate communication between all devices.
• Environment and hardware configuration on Beckhoff’s TwinCAT3 firmware
Become familiar with Beckhoff TwinCAT3 environment, configure EtherCAT devices and I/O modules, develop motion control software using Structured Text, develop operating modes for various tests.
• Testing and tuning of the testbench
Characterization of the behavior of motorized axes, tuning of controlled parameters to achieve stable and repeatable positioning. Optimization of trajectories and positioning performance. Development of automated testing procedures.
• Characterization of performance
Measurement of positioning accuracy and repeatability with our optical testbench. Comparison of the Beckhoff implementation with the existing control architecture. Documentation of the results and identification of potential improvements for future integration on the BlueMUSE instrument.
The exact scope will be decided together with the student at the start of the project.
PROFILE
• M.Sc. student in Electrical Engineering, Embedded Systems, Robotics, Computer Engineering, Mechatronics or a related field.
• Good knowledge of control and/or electronics. Preferably with previous experience in motor tuning.
• Basic understanding of microcontroller architecture (how the CPU, memory, and peripherals are connected).
• Experience in writing Python scripts for data processing and results plotting.
• Careful and structured, with good attention to detail.
• Comfortable working independently and taking initiative.
The following are a bonus but not required:
• Experience with EtherCAT or CAN communication.
• Experience with PLC programming
CONTACT
Gloria Mellinand
STATUS OF THE PROJECT
Improve accuracy of reentry trajectories
- Supervision: eSpace/LASTRO (Prof. Jean-Paul Kneib/Stephan Hellmich) with external support from TU Delft (Dominic Dirkx)
- Type of Project: Master thesis project
- Duration: 18/26 weeks (Official start/end date: TBD)
- Submission of final report: TBD
- Final Presentation: TBD
- Recommended: This project is suitable for a student interested in orbital mechanics, atmospheric modelling and space sustainability.
CONTEXT
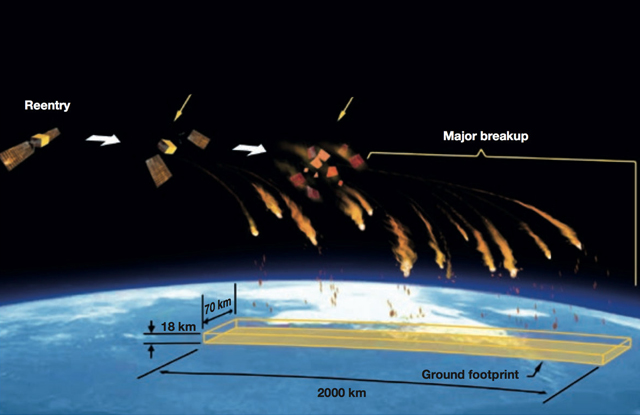
During the last five years, the number of satellites in orbit has dramatically increased due to the satellite mega constellations that are currently installed in low Earth orbit (LEO). The high pace in the development of new satellite communication technologies results in mega constellation satellites being frequently replaced which in turn leads to the number of objects that reenter Earth’s atmosphere significantly increases. To reduce ground casualty risks, the satellites are designed for optimal demise which results in almost the entire mass of the satellites being dispersed in the atmosphere. The substances released during the demise have consequences that need to be quantified in order to understand the implications of the increasing number of reentries. This project aims to improve the accuracy of reentry trajectories to enable dedicated observations of satellite demise that are required to quantify the implications on the atmosphere.
PROJECT SCOPE
Most reentries are uncontrolled which means that the exact location is not known and makes dedicated observations of the breakup and demise impossible. During the last few orbits, the trajectory of a LEO satellite is increasingly influenced by atmospheric drag. Precise propagation of the trajectory thus relies on information of the shape and attitude of the satellite as well as timely atmospheric data on density and wind speeds in the atmosphere. This project aims to incorporate this information in orbit propagation to increase the accuracy of the predicted reentry location. It is planned to implement these capabilities as into the open-source astrodynamics library “TU Delft Astrodynamics Toolbox” Tudat[1] , developed at TUDelft. Tudat already contains basic functionality to consider object shape and attitude as well as information on the atmosphere using the NRLMSISE-00[2] global reference atmospheric model. The main objective of this project is to implement a more accurate atmospheric model that can incorporate real-time weather data and provides more comprehensive data required to determine the precise reentry point.
TASKS
- Familiarize yourself with Tudat
- Perform a literature review of available atmospheric models that can be implemented
- Identify and implement the most suitable model
- Setup an orbit propagation example with shape and attitude dependent drag and lift coefficients
- Use data from historic reentry events to evaluate the new method
REFERENCES
- https://doi.org/10.1016/j.jsse.2023.11.009
- https://doi.org/10.1016/j.ast.2022.108077
- https://doi.org/10.1029/2020ea001321
CONTACT
Dr. Stephan Hellmich: stephan.hellmich@epfl.ch
STATUS OF THE PROJECT
Recovering satellite location and time measurements with imperfect tracking
-
Supervisor: eSpace/LASTRO Prof. Jean-Paul Kneib, Berry Holl,s2a-systems
-
Type of Project: Semester project (TP4b)
-
Duration: 14 weeks (Official start/end date: September 7-December 18)
-
Submission of final report: January 11
-
Recommended: This project is suitable for a student interested in astronomy, image reconstruction, and optical instrument design.
This project is suitable for a student interested in astronomy, image reconstruction and optical instrument design.
CONTEXT
When estimating satellite orbits from optical telescope images, we normally start with an estimate of the current best known orbit as encoded in a Two Line Elements, or TLE for short. There are two main ways of imaging such object:
- Object tracking: we try to move the telescope to match the motion of satellite, either by the predicted motion on the sky provided by the TLE, or by actively tracking the satellite in a feedback loop on the telescope. This (ideally) produces an image where the satellite in each image is imaged as a point-source, while the stars will appear as trailed straight lines*.
- Alternatively, there is the leap-frog method: here we place the telescope slightly ahead of the satellite, start sidereal (stellar) tracking, and make an image for the duration of the satellite passing the FoV. In this case (ideally) the stars will appear as point sources and the satellite will leave a straight trail* in the image. For multiple measurements, one needs to move the telescope quickly in front of the satellite, hence the name.
* Whatever is making the trail(s): it important to make sure the trails start and end within the image, and the start- and end-time of the image to be recorded precisely, so that one can estimate the ‘center’ of the linear motion, from which the mean position can be deduced for each (mean) image time.
The extraction of useful position and time measurements from the above tracking modes is rather straightforward, and work fine for well-calibrated, fixed-mounted telescopes. However, tracking might not always be perfect, especially when using non-fixed ad-hoc places telescopes that are not perfectly aligned, and/or for which the tracking is not working as precise. You can imagine that with the leap-frog method, the telescope might not have reached exact sidereal tracking speed while the satellite is passing through the frame, thus producing streaks for both stars and satellite.
This project aims to develop a technique to extract useful position and time information from images that contain streaks of both stars and the target satellite.
(Note that for this project your will be using images taken by a global-shutter camera, thus removing the complication of the typical CMOS rolling shutter effect that is being addressed in one of the other projects.)
PROJECT SCOPE
For this project you will be provided with images taken with a global-shutter cameras mounted on a 12inch ‘backyard’ Meade LX200GPS telescope (and if you are interested, can join some observation sessions in which they are obtained).
You will be provided with software that is able to predict the satellite and star positions for a given time, thus allowing to ‘draw’ the position of these stars and the satellite in a ‘prediction’-image at the middle time of the observation (i.e. no trails!). From this you first identify in the real (trailed) image which of the stars are visible and if their trails are confined to within the image, and which is the satellite trail, and ‘separate’ these two groups of data. Next you will try to estimate the ‘blurring-kernel’ of the stars: basically, the motion vector that describes the common trail motion of all stars in the image. There are two cases that can be considered on this project:
- Only linear motion of the star-field and satellite: in this case the goal is to automatically identify the begin and end points of all line trails. Taking the mid-points of all stellar trails we can then ‘plate-solve’ the image against the predicted image to find out exact where the image was pointing mid-observation. Now we can subtract the (average) linear star motion from the imaged satellite trail motion to recover the satellite true motion. Effectively we reconstruct how the sidereal tracked image would have looked.
- This is an optional advanced extension of this problem to non-linear motion: in case there were some residual telescope vibrations the trails can become more ‘jagged’ and the motion is no longer linear. In this case more advanced methods can be used to estimate our blurring kernel, from the flux distribution of (the mean of) multiple stellar trails. This kernel can then be used to ‘deblur’ (deconvolve) the trail of the satellite trail. The technique for this last step could be borrowed from Fergus et al. 2006 (note that due the point-like nature of our stellar images the kernel estimation on our side is probably as simple as taking the mean of the stellar image trails, so it is much simpler than in the paper).
TASKS
- Familiarize yourself with the code to predict the stellar and satellite positions as function of time for a provided TLE (i.e. simulate the movement over a typical pass overhead).
- Implement routines to identify lines in the image, and distinguish the ones that move similar: separating the stars from the satellite(s)
- Implement routines that measure the begin and end points in the image.
- Derive the stellar mean points and implement a method to match this against the predicted star positions for the mean-time of the observation (we can probably also use pre-existing routines/software for the last plate-solving part).
- Correct the motion of the satellite streak to extract the motion path of the satellite in the image.
- Compare the predicted satellite motion from the provided TLE with the motion you have derived from the image and determine the precision of the reconstruction assuming the provided TLE contains the ‘ground truth’.
CONTACT
Dr. Berry Holl
STATUS OF THE PROJECT
Study the consequences of the break-up of the geostationary satellite Luch/Olymp
- Supervisor: eSpace/LASTRO/s2a-systems (Jean-Paul Kneib, Stephan Hellmich, Roger Spinner)
- Type of Project: Semester project
- Duration: 14 weeks (Official start/end date: September 7-December 18)
- Submission of final report: January 11
This project is suitable for a student interested in space surveillance and tracking, processing of astronomical data and orbital mechanics. Prior knowledge in Python is a plus.
CONTEXT
The orbital environment is currently reaching a critical threshold due to the accumulation of space debris, a situation caused by the rising number of decommissioned satellites that remain in orbit for centuries or even longer. In high-altitude regions like the Geostationary Orbit (GEO) and its graveyard orbit, a few hundred kilometers above, the lack of atmospheric drag results in fragments from satellite breakup persist for thousands of years. Decommissioned satellites pose a dual threat: they represent large, unmaneuverable targets for unintended collisions and carry potential internal energy sources that can lead to spontaneous explosions if not properly passivated. Such fragmentation events create clouds of high-velocity particles that can disable operational satellites, potentially triggering the Kessler Syndrome – a cascading chain reaction of collisions that could eventually render entire orbital regions unusable for future generations.
PROJECT SCOPE
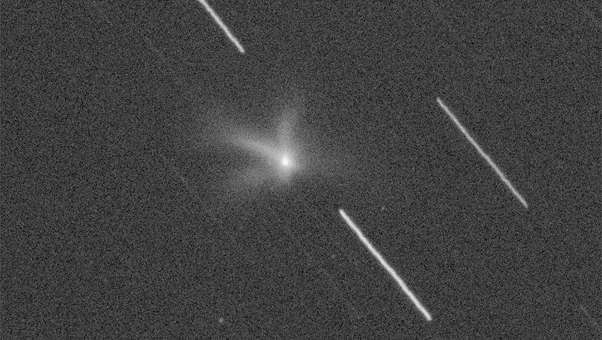
The Luch/Olymp satellite (NORAD catalog number 40258), launched in 2014, in the geostationary orbit (around 35,786 kilometers above the equator) was recently decommissioned and sent into the graveyard orbit above GEO in October 2025. S2a-systems, s Swiss SSA/SDA company, has acquired data from Luch/Olymp since the decommissioning and also recorded the sudden break-up of the object on January 30. 2026. The breakup of a large, complex satellite like Luch/Olymp creates a new population of unmanaged debris in a sensitive orbital region. According to initial reports from s2a systems and space debris experts, either a space debris impact or a passivation failure (e.g., fuel or battery explosion) may have caused the fragmentation. The observations suggest that the object maintained a stable attitude until the break-up event. During a period of about 45 minutes, several explosions were recorded releasing multiple trackable fragments.
TASKS
In a previous project, procedures to detect fragments and determine their orbits were implemented. The goal this project is to study how the fragments disperse in orbit and investigate if they might pose a risk to decommissioned and active satellites in GEO. The investigation consists of the following tasks
- Familiarize yourself with the data and software tools for astronomical image processing (net, astropy, photutils) and orbit determination (Tudat)
- Perform long-term orbit propagation of the fragments to assess the threat of the resulting debris cloud to operational geostationary satellites
CONTACT
Dr. Stephan Hellmich
STATUS OF THE PROJECT
Detect faint fragments from the break-up of the geostationary satellite Luch/Olymp
- Supervisor: eSpace/LASTRO/s2a-systems (Jean-Paul Kneib, Stephan Hellmich, Roger Spinner)
- Type of Project: Semester project
- Duration: 14 weeks (Official start/end date: September 7-December 18)
- Submission of final report: January 11
This project is suitable for a student interested in space surveillance and tracking, processing of astronomical data and orbital mechanics. Prior knowledge in Python is a plus.
CONTEXT
The orbital environment is currently reaching a critical threshold due to the accumulation of space debris, a situation caused by the rising number of decommissioned satellites that remain in orbit for centuries or even longer. In high-altitude regions like the Geostationary Orbit (GEO) and its graveyard orbit, a few hundred kilometers above, the lack of atmospheric drag results in fragments from satellite breakup persist for thousands of years. Decommissioned satellites pose a dual threat: they represent large, unmaneuverable targets for unintended collisions and carry potential internal energy sources that can lead to spontaneous explosions if not properly passivated. Such fragmentation events create clouds of high-velocity particles that can disable operational satellites, potentially triggering the Kessler Syndrome – a cascading chain reaction of collisions that could eventually render entire orbital regions unusable for future generations.
PROJECT SCOPE
The Luch/Olymp satellite (NORAD catalog number 40258), launched in 2014, in the geostationary orbit (around 35,786 kilometers above the equator) was recently decommissioned and sent into the graveyard orbit above GEO in October 2025. S2a-systems, s Swiss SSA/SDA company, has acquired data from Luch/Olymp since the decommissioning and also recorded the sudden break-up of the object on January 30. 2026. The breakup of a large, complex satellite like Luch/Olymp creates a new population of unmanaged debris in a sensitive orbital region. According to initial reports from s2a systems and space debris experts, either a space debris impact or a passivation failure (e.g., fuel or battery explosion) may have caused the fragmentation. The observations suggest that the object maintained a stable attitude until the break-up event. During a period of about 45 minutes, several explosions were recorded releasing multiple trackable fragments.
TASKS
In a previous project, procedures to detect fragments and determine their orbits were implemented. However, only a few larger fragments are currently identified lots of smaller debris remain undetected. The goal of this project is to implement advanced image stacking techniques to enhance the visibility of faint fragments. Once they have been detected, orbit determination using the previously developed tools can be performed in order to get a more complete picture of the fragmentation event. The investigation consists of the following tasks
- Familiarize yourself with the data and software tools for astronomical image processing (net, astropy, photutils) and orbit determination (Tudat)
- Apply synthetic tracking to enhance the visibility of faint debris
- Detect faint debris and perform orbit determination
CONTACT
Dr. Stephan Hellmich
STATUS OF THE PROJECT
Implement procedures to photometrically calibrate space debris tracking data
- Supervisor: eSpace/Laboratory TBD (Prof. TBD/Stephan Hellmich, Roger Spinner (s2a-systems))
- Type of Project: Semester project
- Duration: 14 weeks (Official start/end date: September 7-December 18)
- Submission of final report: January 11
This project is suitable for a student interested in the software design of autonomous observatories and space surveillance and tracking with a background in software development. Prior knowledge in Python is a plus.
CONTEXT
As part of a collaborative project with Uni Bern, the 0.6m TELESTO telescope at the observatory of Geneva is used for space debris tracking. The primary goal of the observations is to acquire data that can be used to characterize the rotation state of the observed object. The observations are performed while tracking the target as it is crossing the sky and use very short exposure times. This results in traditional methods to obtain the apparent magnitude of the target using relative photometry cannot applied due to the lack of field stars. Further, as the targets are observed over a wide range of elevation, extinction coefficients are required to estimate how the observations are affected by atmospheric extinction. The goal of this project is to develop a procedure to acquire calibration data that can be used to estimate the apparent magnitude of space debris from observations in tracking mode.
PROJECT SCOPE
To obtain the required calibration data, a series of observations of photometric reference stars is required. These stars should be well distributed over the observable sky and automatically selected from the GAIA star catalog. A sequence to acquire a series of images for the selected reference stars needs to be implemented and tools for automated image reduction to extract the extinction coefficients and zeropoint magnitudes to calibrate the brightness of the observed satellites need to be developed.
TASKS
- Familiarize yourself with the telescope and the software interface (ASCOM, Alpyca)
- Familiarize yourself with the data formats (FITS) and basic data processing tools (astropy, photutils)
- Implement procedure to acquire calibration data
- Develop tools for data reduction, extinction correction and zeropoint magnitude determination
CONTACT
Dr. Stephan Hellmich
STATUS OF THE PROJECT
Detect space objects observed with the Dark Energy Camera
- Supervisor: eSpace/LASTRO (Prof. Jean-Paul Kneib/Elisabeth Rachith/Stephan Hellmich)
- Type of Project: Semester project (can be extended for master thesis project)
- Duration: 14 weeks (Official start/end date: September 7-December 18)
- Submission of final report: January 11
This project is suitable for a student interested in data science and machine learning
CONTEXT
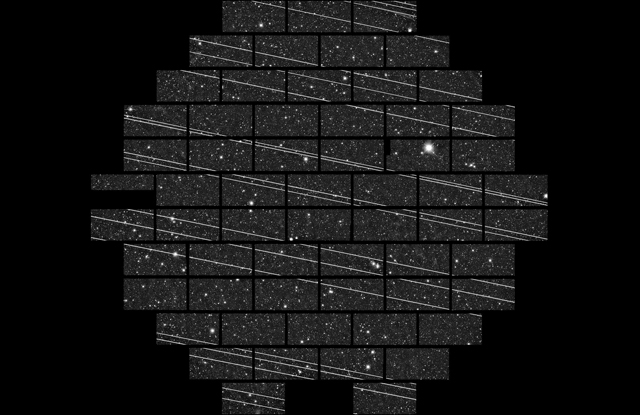
As part of the newly established Space Sustainability Hub (SSH) at eSpace, we are exploring novel techniques for determining the rotational and physical properties of space debris. For this purpose, we are currently developing methods for the detection and extraction of space debris observations from large astronomical data archives. On the astronomical images, these objects appear as characteristic streaks, most of which cross the entire detector during the several minutes of exposure time. While satellite streaks are usually considered as interference with astronomical observations, they also contain valuable insights about the observed object. Large data archives from wide field survey telescopes contain large amounts of random satellite and space debris observations and are therefore an additional source for important information that are relevant to better understand the space debris population and support active debris removal. For developing and testing the detection and data reduction techniques we focus on the archive acquired within the last decade by OmegaCAM, a 256 megapixel CCD mounted at the 2.6 m ESO VLT Survey telescope (VST). However, a few minor modifications will allow processing data from other telescopes too. This project is intended to prepare the streak detection method to be used on images acquired by the 500 megapixel Dark Energy Camera (DECam), mounted on the 4 m Victor M. Blanco telescope at the Cerro Tololo Inter-American Observatory.
PROJECT SCOPE
The main goal of this project is to retrain the streak detection method on DECam data. The annotation of a dataset for training validation and testing was already started in a previous project. This dataset contains streak detections obtained with a Hough Transform based line detection method and provides thousands of real satellite streaks that can be used for training. Also in a previous project, alternative machine learning algorithms have been implemented, trained and compared with our method on OmegaCAM data. The goal of this project is to decide which architecture is most suited for DECam, retrain with DECam images and set up a pipeline to process the DECam archive on EPFL HPC infrastructure.
TASKS
- Familiarize yourself with the DECam astronomical data archive observational data formats
- Modify the tools for data annotation to be used with DECam images
- Create a dataset for training and validation
- Re-train the neural network and analyze its performance on DECam images
- Create a pipeline for processing the DECam data on EPFL HPC infrastructure
CONTACT
Dr. Stephan Hellmich
STATUS OF THE PROJECT
Improving the closed-loop telescope control software for high precision satellite tracking
- Supervisor: eSpace/Laboratory TBD (Prof. TBD/Stephan Hellmich)
- Type of Project: Semester project
- Duration: 14 weeks (Official start/end date: September 7-December 18)
- Submission of final report: January 11
This project is suitable for a student interested in the software design of autonomous observatories and space surveillance and tracking with a background in software development. Prior knowledge in Python is a plus.
CONTEXT
As part of a collaborative project with Uni Bern, the 0.6m TELESTO telescope at the observatory of Geneva is used for space debris tracking. The primary goal of the observations is to acquire data that can be used to characterize the rotation state of the observed object. Because the telescope is not designed to track objects in orbit, a closed-loop satellite tracking procedure was developed. The aim of this project is to further develop this procedure to implement new features, make it more reliable and easier to use.
PROJECT SCOPE
The current version of the procedure uses the orbital elements of the target to initialize the tracking and while the date is acquired, the target is automatically identified on the image and the tracking of the telescope is adjusted using a closed-loop control procedure to center the target in the field of view. After this is achieved, tracking rates are computed from the orbit of the target. Since we specifically focus on space debris, it is difficult to estimate the brightness of the object beforehand. Due to the lack of attitude control, the targets are tumbling, resulting in drastic changes in the brightness. To avoid sensor saturation, the images need to be analyzed while they are acquired and the exposure time needs to be adjusted.
TASKS
- Familiarize yourself with the telescope and the software interface (ASCOM, Alpyca) and tools for orbit propagation to compute satellite positions (skyfield)
- Familiarize yourself with the data formats (FITS) and basic data processing tools (astropy, photutils)
- Implement online image analysis to adjust exposure time while the observations
- Perform test observations
CONTACT
Dr. Stephan Hellmich
STATUS OF THE PROJECT
Proton Irradiation of Nvidia GPU
- Supervisor: CVLab, Mathieu Salzmann and Andrew Price
- Type of Project: Master project, 1 student
- Duration: 1 Semester
- Recommended: This project is suitable for a student interested in the space sector, hands on experiments, and/or electromagnetic radiation.
RECOMMENDED
This project is suitable for a student interested in one or more of the following topics: the space sector, hands on experiments, machine learning, electromagnetic radiation, and/or edge deployment.
CONTEXT
CVLab and the Space Centre are currently engaged in research supporting deploying machine learning algorithms on edge devices in-orbit. This includes power constraints, bandwidth constraints, explainable AI, and improving fault-tolerance of machine learning algorithms.
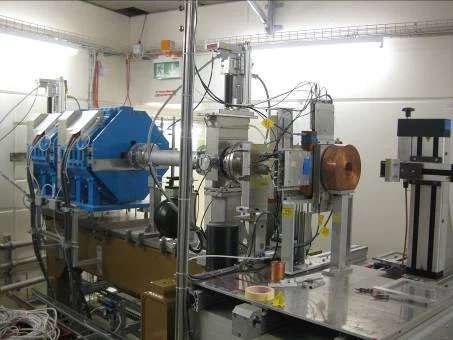
With funding secured from ESA and the Swiss Space Office, CVLab and the Space Centre will perform some radiation experiments at the PSI Proton Irradiation Facility. A machine learning algorithm will be deployed to a Nvidia Jetson Orin NX. A proton beam will irradiate the jetson to cause Single Event Events (SEEs). When exposed in such a manner, an SEE can cause bit flips in the machine learning algorithm resulting in reduced performance or outright failure.
PROJECT SCOPE
The student will support the proton irradiation experiments and validation against simulated results. The student will prepare practice runs of the radiation testing and then perform the radiation testing at the Paul Scherrer Institute. The student will log and analyze the results.
EXPECTED OUTCOME
- Completion of proton radiation experiments on Nvidia Jetson Orin NX
- Validation against simulation results (provided by Andrew)
- Thesis / report
LIST OF TASKS AND TENTATIVE PLANNING:
- Familiarize self with literature; effect of radiation on hardware.
- Familiarize self with hardware.
- Perform radiation experiment test runs.
- Perform radiation experiment at the Paul Scherrer Institute
- Analyze the fault propagation through the devices.
- Comparison of experimental results to simulated results.
- Report writing
REQUIREMENTS
- Excellent python programming; C is an asset
- Experience with edge devices or deployment is an asset
- Independent methodical worker, ability to troubleshoot
- Good communication skills in English
TYPE OF WORK
20% Theory, 50% Experiments, 20% Analysis, 10% Documentation
CONTACT
Dr. Andrew Price: andrew.price@epfl.ch
REFERENCES
- Sources of Single Event Effects in the NVIDIA Xavier SoC Family under Proton Irradiation https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9897236
- Proton Evaluation of Single Event Effects in the NVIDIA GPU Orin SoM: Understanding Radiation Vulnerabilities Beyond the SoC https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=10616076
- Using ensemble learning to improve to improve radiation tolerance of CNNs in space applications
https://zenodo.org/records/13885495
STATUS OF THE PROJECT
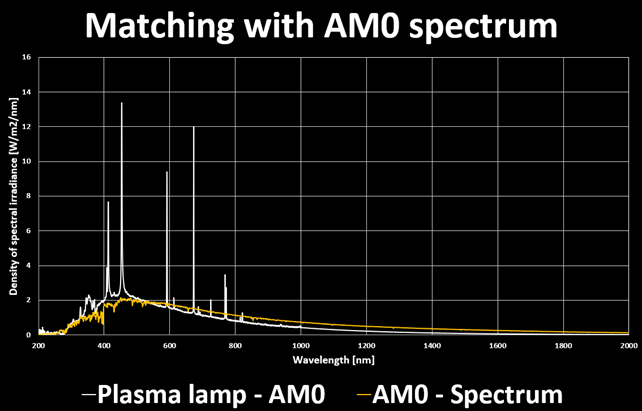
Internship with Lumartix SA: A solar simulation lighting system for the AM0 spectrum
- Supervision: Lumartix SA, Aubonne

- Type of Project: Master/Bachelor Internship
- Duration: 26 weeks (Official start/end date: 1 July – 31 December 2026)
- Submission of final report: TBD
- Final Presentation: TBD
- Recommended: This project is suitable for a student with a solid foundation in electricity and electronics, including experience in PCB design and manufacturing.
This internship will involve the development of a next-generation solar simulator designed to reproduce the AM0 spectrum for high-efficiency triple-junction (3J) and quadruple-junction (4J) solar cells.
The successful candidate will be actively involved in the full development cycle of the system, with a strong focus on the optical design and implementation. Responsibilities will include the design and optimization of the optical components, as well as the complete characterization and performance validation of the system through advanced measurements.
A key aspect of this internship is the hands-on development of a functional prototype, giving you the opportunity to apply your theoretical knowledge to a real industrial project and gain practical experience in a high-tech environment.
The student is expected to have a solid foundation in electricity and electronics, including experience in PCB design and manufacturing. Knowledge of mechanical design and basic optics is also required to successfully contribute to the development of the system.
For the optical and photometric aspects of the project, training will be provided. The student will have access to advanced measurement equipment and will be trained in its proper use for system characterization and validation.
Details
Lumartix SA,
Rue de l’Ouriette 131,
1170 Aubonne,
SwitzerlandAny time from the 1st July to the 31 December 2026
EPFL Rocket Team
Click HERE to visit the EPFL Rocket Team’s projects page.
EPFL Spacecraft Team
Click HERE to visit the EPFL Spacecraft Team’s projects page.
Xplore
Click HERE to visit Xplore’s projects page.
Asclepios
Click HERE to visit Asclepios’s projects page.